
進捗状況(2025年度)
5Gを活用した最先端研究
○5Gを活用した最先端研究を行い、成果を社会に発信しました。
■研究課題1「L5Gネットワークを用いた次世代マルチモーダルセンシング」
研究代表者:和田 圭二 教授(システムデザイン研究科)
ローカル5G(L5G)ネットワークを用いて、次世代の情報通信技術を基盤とするセンシングシステム(無線通信機能を持つ複数の小型センサー端末を特定の空間内の各所に設置し、複数の計測方法で同時計測することで、空間内の情報を計測・判別するシステム)の提案・構築を目指しています。また、電磁環境の計測やエネルギー制御技術の基盤構築に取り組むことにより、安心・安全なシステムの実現可能性について、立証を行っています。これらの取組を通じて、人間の動きや密集度を安定的に計測・評価することが可能になり、ウィズコロナ及びポストコロナを見据えた感染症対策や、災害時に安全な避難経路を提示するなど、次世代の防災システムの構築に貢献することを見込んでいます。
2025年度は特に、通信とセンシングを同一ハードウェアで実現するISACをはじめとする次世代情報通信技術の普及による電波利用高密化を見据えた電波環境の安全性評価(「身の回りの電波は安全か」という都市部に住む人々の関心にも直結するテーマ)、2024年度に開発したミリ波帯新型アンテナ研究の継続的な発展、そしてAIエージェント活用に取り組むことのできる次世代研究人材の育成の3点に重点的に取り組みました。
L5G環境における電波の安全性を1年間にわたり実測
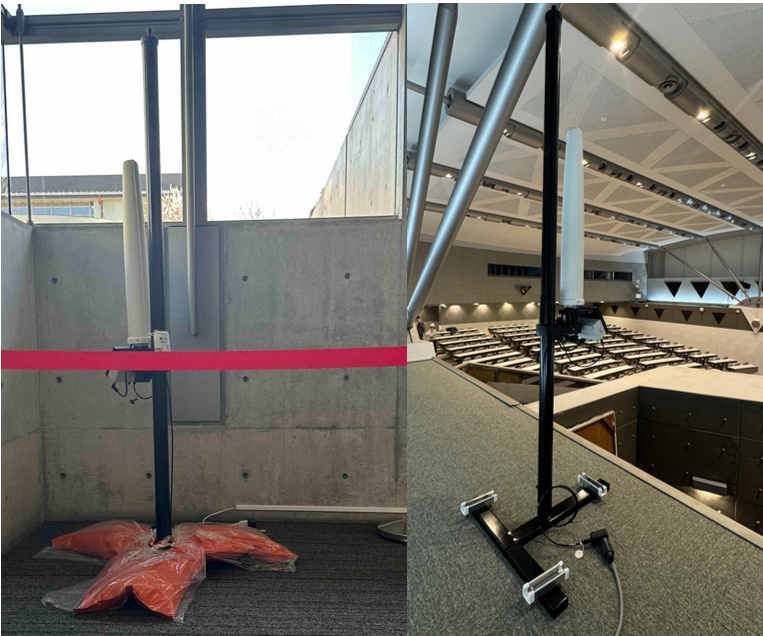
5G、そしてISACを含む次世代通信技術への進展に伴い、電波利用はますます高密化しつつあります。こうした中、「身の回りの電波は本当に安全なのか」という関心に科学的根拠をもって答えることは、ますます重要な課題となっています。この問いに応えるため、東京都立大学では、国立研究開発法人情報通信研究機構(NICT)との協力のもと、日野キャンパス内の2地点において2024年4月から2025年3月までの1年間にわたる電波レベルの連続測定を実施しました。測定は、総務省が推進する電波の安全性評価事業の一環として行われ、全国35地点の測定ネットワークの一部を構成しています。
測定には、300kHz〜40GHzの広帯域を常時監視できる装置を用い、6分ごとの時間平均値を1年間連続で記録しました。(図1)
指針値を大幅に下回る安全なレベルの測定結果
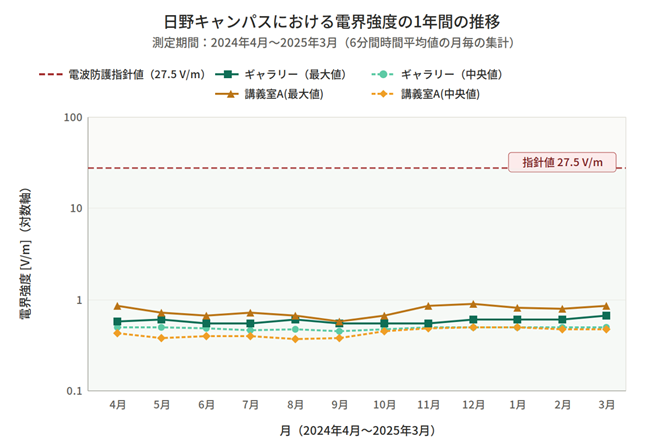
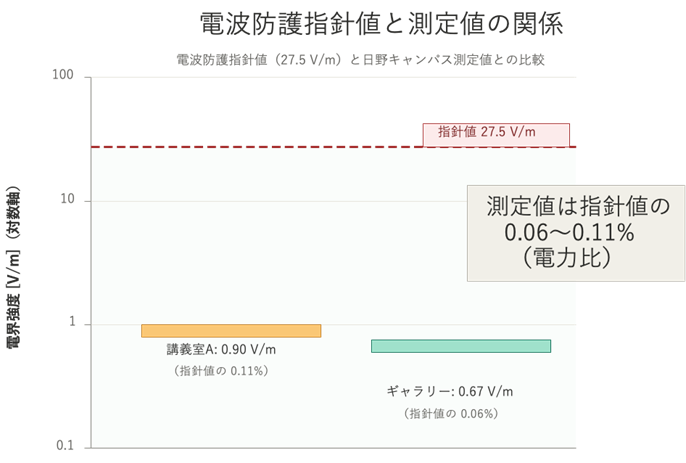
測定の結果、2地点における電界強度(その地点における電波の強さ)は、国が定める電波防護指針の基準値(27.5 V/m)と比較して極めて低い水準であることが確認されました。
- 2号館B1F 多目的ギャラリー:最大値 0.67 V/m(指針値の 0.06%)、年間中央値 0.48 V/m
- 2号館2F 大講義室A:最大値 0.90 V/m(指針値の 0.11%)、年間中央値 0.46 V/m
いずれも指針値の0.1%前後という極めて低いレベルであり、1年を通じて大きな変動は見られませんでした。(図2、図3)
また、電波の内訳を詳しく調べた結果、最も寄与が大きかったのは携帯電話システムの電波であり、5G通信システム単独の寄与は全体の数%に留まることが分かりました。5Gの導入によって電波環境が急激に悪化するのではないか、という懸念に対して、実測データに基づく客観的な回答を示すことができたと考えています。
本成果は、全国35地点の測定データと合わせて、都民・国民に対する電波の安全性に関する科学的根拠の提供に貢献するものであり、今後も継続的にモニタリングを行う予定です。
ミリ波帯新型アンテナ研究の進展
2024年度にご報告した「等間隔サーキュラアレー(UCA)アンテナ」の研究成果については、ISAC実現の中核となる要素技術として、実用化に向けた応用可能性の精査と研究内容のさらなる洗練を進めています。任意の方向に電波を制御できるUCAアンテナの特性は、通信とセンシングを同一ハードウェアで実現するISAC実装において特に重要です。2024年度に電子情報通信学会「エレクトロニクスソサイエティ学生奨励賞」を受賞した成果を基盤として、より堅実な形で国内外に発表すべく、論文化の準備を進めているところです。5G/6G通信および無線電力伝送の両面での応用を見据え、成果発表に向けて研究を継続しています。
AIを活用した基地局自動探索エージェントの開発と次世代研究人材の育成
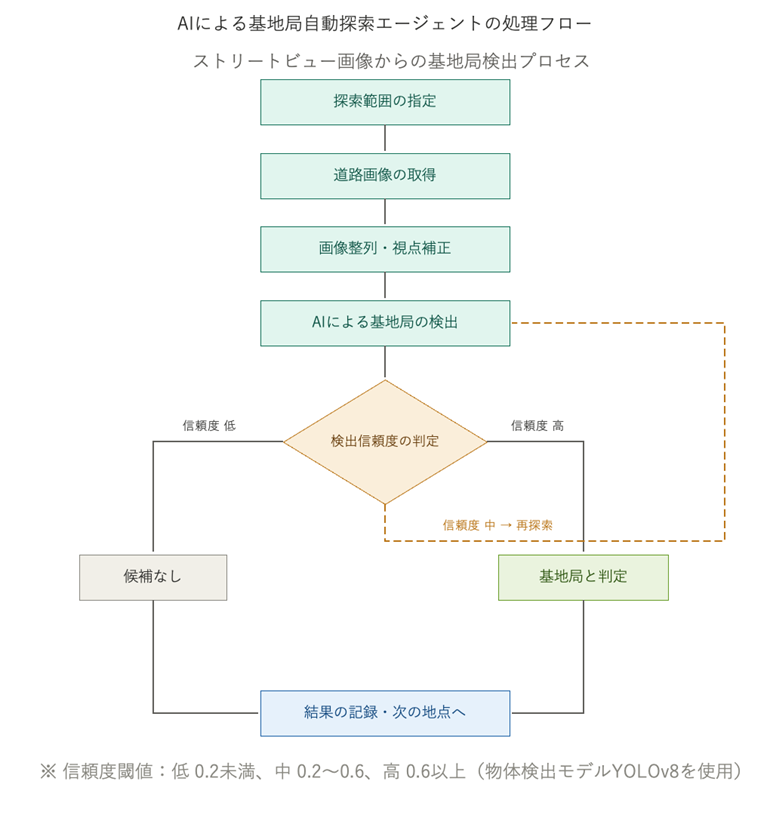
ISAC実装を想定した電波環境を都市全体で評価するためには、電波源である基地局の位置情報を広域かつ効率的に取得することが重要となります。この課題に対して、本年度は学部卒業研究として、人工知能(AI)による物体検出技術と地理空間情報を組み合わせた基地局自動探索エージェントの開発に取り組みました。
本研究では、インターネット上に公開されているストリートビュー画像をAIが自動的に解析し、画像中から基地局アンテナを検出します。さらに、人間が街を歩きながら周囲を見回すように、「前方を確認し、怪しい対象があれば視点を調整して再確認する」という人間の探索行動を模倣したエージェントを構築しました。(図4)
東京都立大学南大沢キャンパスから豊田駅までの区間を対象とした地理空間情報を利用した実験では、239地点のパノラマ画像から基地局候補を自動抽出することに成功しました。(図5)この成果は、将来的に電界強度の広域推定へと発展させることを目指しており、上記の電磁環境測定と組み合わせることで、都市全体の電波環境を効率的に把握する基盤技術となることが期待されます。
本研究は学部生の卒業研究として実施され、AIエージェントを活用する次世代の研究人材育成にも貢献しています。

■研究課題2「超実時間モニタリングのためのロボット知能化基盤技術と5G社会」
研究代表者:久保田 直行 教授(システムデザイン研究科)
大容量・低遅延、同時多接続の5Gを最大限に活用してSociety 5.0を実現するため、ロボットの高度知能化基盤技術を確立します。①超実時間トラッキングイノベーション(計測)、②超実時間モニタリングイノベーション(認識・予測・推定)、③オンライン機械学習イノベーション(学習)、④オンラインロボット適応イノベーション(適応)の4つの点に関する研究開発を行うことで、パーソナルモビリティや自動搬送車への展開、林業や建設業の現場における自動化、自律化の実現に貢献することを見込んでいます。
・2021-2024年度までの取組概要
【人生120年時代のモビリティ】
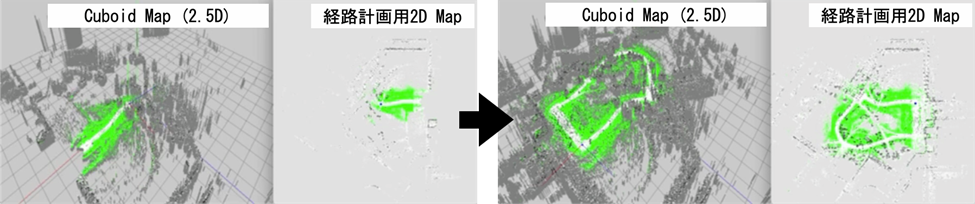
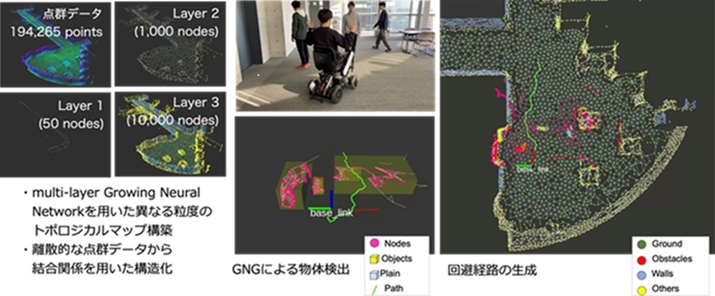
本研究課題での取り組みを、日刊自動車新聞リレー連載で紹介しました(人生120年時代のモビリティ、交通安全・医理工連携の今 「世界一への挑戦」日刊自動車新聞リレー連載 2022年4月9日、16日)。現在、人生100年と言われていますが、近い将来、120年という時代が来るでしょう(図1)。人間は、自律的な動物です。最新の医療だけでなく、人工知能やロボット技術に支えられる人生120年時代のライフステージでは、60才で折り返し、仕事・社会貢献・自己実現・趣味・娯楽などが織り込まれた、人それぞれ価値観の異なる多彩なライフスタイルを送ることになります。このことからも人間にとって自ら「動く」ことがどれほど大切であるのかがよくわかります。屋外の移動では、ラストワンマイル問題を解決するために、様々なパーソナルモビリティが開発されてきました。本研究では、屋外でのパーソナルモビリティのナビゲーションのために、2.5次元地図の構築方法を提案し、走行可能な領域を2次元地図に射影し、経路計画を行う手法を提案しました(図2)。次に、屋内外で動的障害物などを回避しながらナビゲーションを行う手法として、地図構築と経路計画を行う階層型トポロジカルクラスタリング手法を用いた手法を開発し、複数の人が行き来する中で、安全性を考慮したリプランニングをリアルタイムに行いながら、目的地に向かう方法論を開発してきました(図3)。これらの研究成果は、①計測、②認識、③学習、④適応に関する研究成果の一部であり、これらの方法論は、計算コストが低く、様々なパーソナルモビリティに実装可能です。

【ローカル5Gを用いたロボット知能化イノベーションコンソーシアム】
ロボット化・知能化が必要な分野を中心に学外研究分担者と連携して社会実装にむけた課題抽出とプロトタイピングにむけた検討を行うために、「ローカル5Gを用いたロボット知能化イノベーションコンソーシアム」を組織し、毎年、東京都立大学サービスロボットインキュベーションHubとコミュニティ・セントリック・システム研究センターと共同で、セミナーや研究会を開催するとともに、国際シンポジウムを開催してきました。以下、コンソーシアムメンバーと検討しながら、研究開発を行った事例を紹介します。
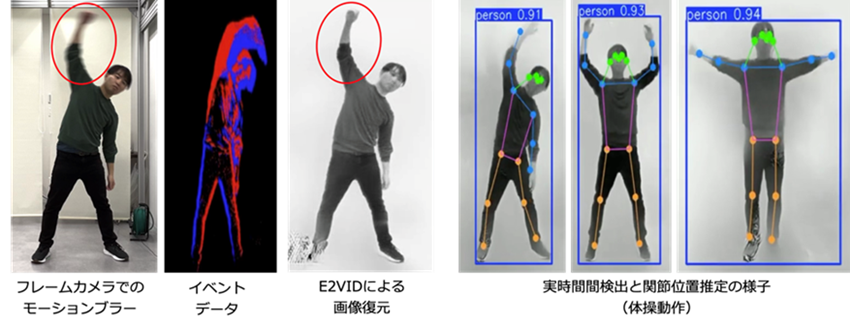
まず、超実時間トラッキングとモニタリングを実現するために、イベントカメラ(event-based camera)を用いたシステム開発を行いました。イベントカメラは、各ピクセルが独立して輝度の変化を非同期に検出し、マイクロ秒オーダーで高速出力可能です。図4(左)に、一般的なフレームカメラとイベントカメラの比較を示します。フレームカメラでは、被写体の動き(手の動作)により画像がぼやける現象(モーションブラー)が発生していますが、イベントデータから画像復元した結果では、手の動作を含め人間を抽出できています。図4(右)では、体操動作において、実時間で人間検出を行いつつ、関節位置の推定が行えることを示しています。次に、イベントカメラにパンチルト機構(カメラの向きを上下左右に動かす仕組み)を追加して、人間追従を行った結果を図5に示します。イベントカメラの性質上、イベントカメラを動かすと、画角内の画像そのものが変化するため、その結果として輝度の変化が生じ、背景画像の変化も含め、多くのイベントデータが発生します。その結果、イベントデータ上では、人間検出が困難になりますが、復元画像上では人間を検出でき、追従できることを示しています。このように、超実時間トラッキングと超実時間モニタリングを目指したイベントカメラ(照度計測ロボット)に関する研究開発を行っており、今後は、スポーツサイエンスへの応用など、検討していく予定です。また、これらの研究成果は、画像ラボ2025年4月号にて紹介されました。

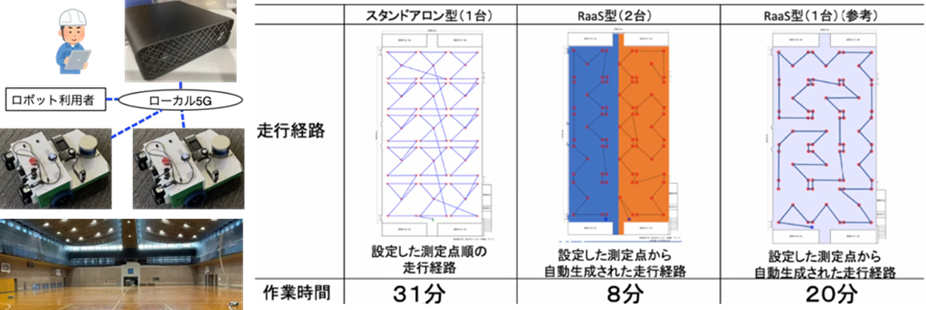
照度計測ロボットに関する研究開発の成果に基づき、リブト株式会社ときんでん京都研究所と連携して、東京都立産業技術研究センターの「中小企業の5G・IoT・ロボット普及促進事業」へと展開しました。ここでは、5G通信を活用したRaaS(Robot as a Service)制御基盤に関する開発を行い、5G通信の大容量性・低遅延性を活用したエッジコンピューティングを用いて、複数台の照度計測ロボットによる大幅な作業の効率化を実現しました。エッジコンピューティングの導入により、ロボット本体での計算コストを大幅に削減し、低価格化と省電力化を実現しました(図6)。特に照度計測作業は、外光が入らない深夜に行われるため、このような実用化は、作業環境の改善に大きく役立ちます。
その他、本コンソーシアムでは、農林水産業におけるAI・ロボットの応用の可能性や、医療・介護分野への応用の可能性、建設現場での応用の可能性など、様々な分野への応用の可能性について議論するとともに、社会実装に向けた研究開発を進めています。例えば、建設現場では、不整地だけでなく、建設途中の建物上には、資材やスラブ、様々なケーブルなどがあるため、キャタピラで走行するクローラーロボットや多脚車輪ロボット用に、3次元地図構築と経路計画を行う階層型トポロジカルクラスタリング手法を開発し、建設現場での走行実験を行い、有効性を示しました。
【丸ビルや海の森、モリコロパークでのデモンストレーション】
本研究課題は、ムーンショット目標3「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」に関する研究開発と、相補的に展開することにより、様々な分野でのAIとロボットを用いた新しい方向性を示してきました。特に、認知能力や身体能力を計測可能な移動式の研究・実証環境であるトレーラリビングラボを用いた様々なデモンストレーションでは、多くの来場者に、最新の研究成果を体験していただきました。また、ムーンショット目標3で開発した要素技術を本コンソーシアムで紹介し、参画企業の多くの研究者とともに、社会実装に向けた課題抽出及びプロトタイプの開発にむけた検討を行った。
THE TIMESで紹介されたSusHi Tech Tokyo 2024 ショーケースプログラム(2024年4月)の様子を図7に示します。このトレーラリビングラボは、利用者が空間に入ると、身長・体重・動作・筋肉反応などがAIによって記録されます。このデモンストレーションでは、来場者はトレーラリビングラボ内でのリアル脱出ゲームなどをとおして計測された認知能力や身体能力データなどから、「何ができて、何が難しくなっているか」を理解できるという取り組みであり、多くの来場者に体験いただきました。
丸ビルのマルキューブで開催された「どこでもヘルスケアパーク2030」(2025年2月)では、トレーラリビングラボの屋内ではリアル脱出ゲームなどを体験していただき、トレーラリビングラボのルーフトップでは、忙しいビジネスマンを対象に5分のエクササイズとして、トランポリンと立漕ぎエアロバイクを用意し、上述のイベントカメラを用いたエクササイズの動作推定を行いました(図8)。
モリコロパークで開催された医療モビリティ博(2025年8月)では、トレーラリビングラボの他、牽引可能な小型トレーラリビングラボを2台搬入し、健康づくり支援用エクササイズや多脚車輪ロボットの遠隔操作などを体験していただきました(図9)。



■研究課題3「”全ての人の手元まで”を実現するマイクロ物流プラットフォーム」
研究代表者:和田 一義 准教授(システムデザイン研究科)
- 研究概要
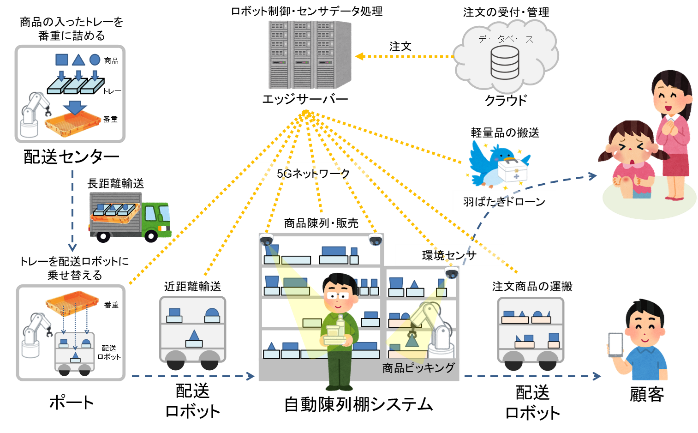
ローカル5G通信を活用し、「全ての人の手元まで」商品が届く物流の実現と、売場管理および近距離物流の自動化を目指しています。そのため、陳列棚と小型物流倉庫の機能を併せ持つ自動陳列棚システム、商品を顧客や自動陳列棚システムに搬送する配送ロボットや羽ばたきドローンから構築される「マイクロ物流プラットフォーム(MiLo)」の開発に取り組んでいます。本研究により、マイクロ物流のスマート化を通して、誰もが必要なものにアクセスできるバリアフリーな店舗の実現に貢献することを目指しています。
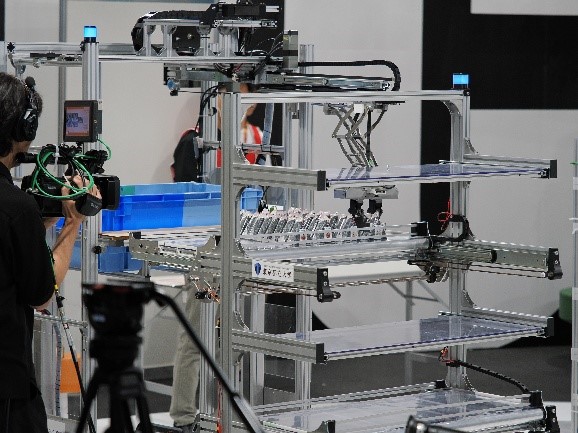
- 自動陳列棚システム「MiLo Store」と配送ロボット「MiLo Bot」の開発
MiLoの実証機の開発を行い、IEEEやSICEなどが主催するメジャーな学会(SIやSIIなど)で発表しました。また、当システムは、大阪・関西万博で開催された「未来づくりロボットWeek(2025年7月13日~19日)」や2025国際ロボット展(2025年12月3日~6日)に出展し、一般の方々にデモンストレーションをご覧いただきました。

- 羽ばたきドローンの開発
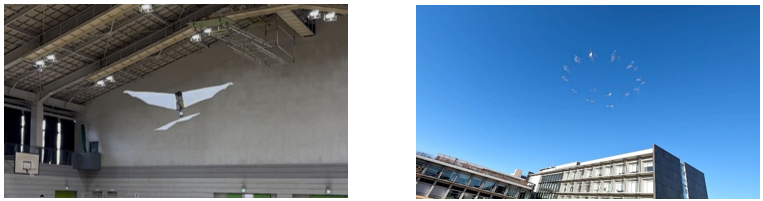
国内では日本ロボット学会にて、海外ではロボット工学分野でのトップカンファレンスであるIROS2025にて、それぞれ羽ばたき飛行ロボットに関する成果発表(歩行機構、自立無滑走離陸)を行いました。さらに、国際的な学術雑誌Transactions on Mechatronicsにおいて研究成果(俊敏な羽ばたき飛行)が掲載されました。また、ローカル5G環境が設置されている日野キャンパス体育館にて、ローカル5Gを介して羽ばたき飛行ロボットの遠隔操縦実験を行いました。
- World Robot Summit 総合優勝
MiLoで必要な商品ピッキング技術の開発応用として、コンビニエンスストアの商品陳列技術の自動化を競う国際的なロボットコンテストに出場しました。ロボットにより、おにぎりを早く正確に並べる「陳列タスク」と、賞味期限切れ商品を回収し、新品商品を補充する「陳列廃棄タスク」に参加しました。その結果、総合優勝を獲得し経済産業大臣賞を受賞しました。大会後には、東京都知事を表敬訪問し、ロボットシステムの解説やデモンストレーションを行いました。


民間企業等の社会実装促進
○ローカル5G環境の民間活用等を通じて、5Gの新たなユースケースやサービスの創出を促進
2025年度に8件の実証フィールド提供を実施しました(2022年度から2025年度までに、累計で36件の実証フィールド提供を実施しています。)。
※東京都立大学では、2026年度にローカル5G環境の再構築を予定しています。
再構築後は、民間企業等と連携した社会実装の取組を一層加速していきます。
2025年度に実施した実証実験の事例を、以下の通りご紹介します。
「ローカル5G 環境における四足歩行ロボットの実証実験」
〇実証実験概要
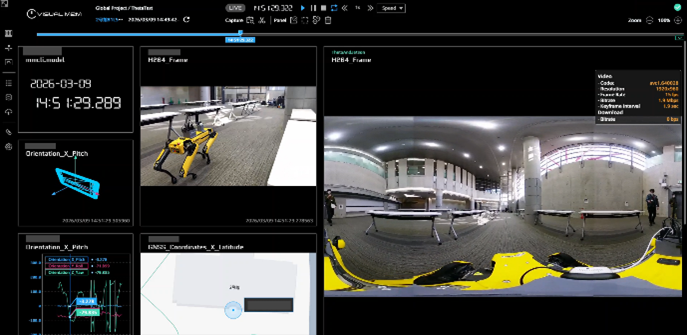
株式会社 Liberawareは、日野キャンパスのローカル5G環境を利用した、「ロボットプラットフォーム構築」の実現に向けて実証実験を行いました。
四足歩行ロボットに搭載した、ローカル5Gとモバイル通信(4G/5G)の通信性能および走破性を比較検証実施した結果、ローカル5G環境では、映像が一時的に途切れたり動きが滑らかでなくなったりするフレームレート欠損や画質の劣化が少なく、通信遅延も低く抑えられ、遠隔監視に適した高い通信優位性が確認されました。
また、ロボットに搭載されたカメラや各種センサーによる障害物認識や走破性にも問題はなく、大規模施設においてもローカル5Gを活用したロボットプラットフォーム構築が可能であることが明らかとなりました。

〇今後の期待
今後は、本実証で確認されたローカル5Gの低遅延・高品質通信の特性を活かし、警備、点検、案内、災害対応など、より実運用に近いユースケースへの展開が期待されます。
また、複数ロボットの同時運用や、AIとの連携を進めることで、効率的かつ高度なロボットプラットフォームの実現につながることが見込まれます。
「5G活用アイデアソン2025」
2025年12月21日に東京都立大学で開催した「5G活用アイデアソン2025」において、優秀アイデアに選定された学生グループの提案のうち、学生が創出した2つの最優秀アイデアを基に、同アイデアソンに協賛いただいた企業と学生が連携して実施した実証実験について報告します。
〇実施例1【アバターロボットグループ】
SNS上では円滑に交流できている一方で、実際の対面の場では「緊張により自分らしく振る舞えない」、「対面での出会い・交流の機会自体が限られている」という課題に対し、アバターロボットを用いた模擬デートにより不安や緊張を軽減し、安心・安全な出会いを創出するアイデアを提案しました。
このアイデアをもとに、iPresence株式会社とTIS株式会社と検討を行い、5Gの優位性を検証するための「遅延差分」の実証と、アイデアの実用性を確認する「体験」の実証を実施しました。
〇実際の実験
男女別に分かれた学生が各自のPCからミーティングへ入室し、進行役の案内のもと短時間の自己紹介を行った後、役割分担をしてアバターロボットを操作しながら提示されたクイズに回答し、最後にデート体験の感想を共有する流れで実施しました。


使用電波:ミリ波、sub6
〇今後の期待
本実証により、ローカル5Gを活用したロボットの遠隔操作・監視における低遅延・高品
質通信の有効性が確認されました。今後は、大規模施設での実運用を想定したロボット活用
への展開が期待されます。
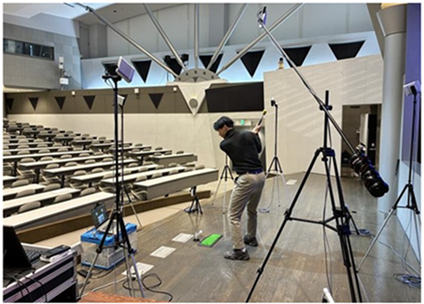
〇実施例2【ボリュメトリックビデオの新しいユースケースグループ】
遠隔スポーツ指導において細かな動作やフォームが伝わりにくく、十分なフィードバックや臨場感のある指導が難しいという課題に着目しました。本学生アイデアをもとに、株式会社クレッセントとTIS株式会社は検討を行い、5Gの優位性を検証する「遅延差分」の実証と、アイデアの実用性を確認する「体験」の実証を実施しました。
〇実際の実験
本実証では、ゴルフトレーナーによる遠隔講義を想定し、Teamsで配信した2D映像の視聴に加え、3Dモデル配信時の遅延を4GおよびL5G(ミリ波)環境下で比較検証しました。
同一条件の3Dモデルデータを用いて計測した結果、画面表示までの遅延は4Gでは約14秒であったのに対し、L5G環境では約4ミリ秒と大幅に短縮され、5Gの低遅延性が確認されました。

〇今後の期待
本実証により、ミリ波5Gを活用することで、ボリュメトリックビデオ(人物や空間を立体的に再現する映像技術)による高精細かつ低遅延な遠隔指導が可能であることが確認されました。今後は、スポーツ指導分野にとどまらず、技能訓練や教育分野など、臨場感が求められる遠隔授業への展開が期待されます。
今後の取組(2026年度)
2026年度における東京都立大学のローカル5G環境については、新たな環境の構築を進めています。再構築後は、多様なユースケースに対応できる実証フィールドとして積極的に活用していきます。
なお、構築完了後は、新たなローカル5G環境について都立大ホームページにて公開します。