進捗状況(2022年7~9月)
AIを活用した雨水ポンプ運転支援技術の開発
〇精度向上に向けた豪雨時データの蓄積
- 豪雨時のデータ数を増やし、AIの解析精度を高めています。
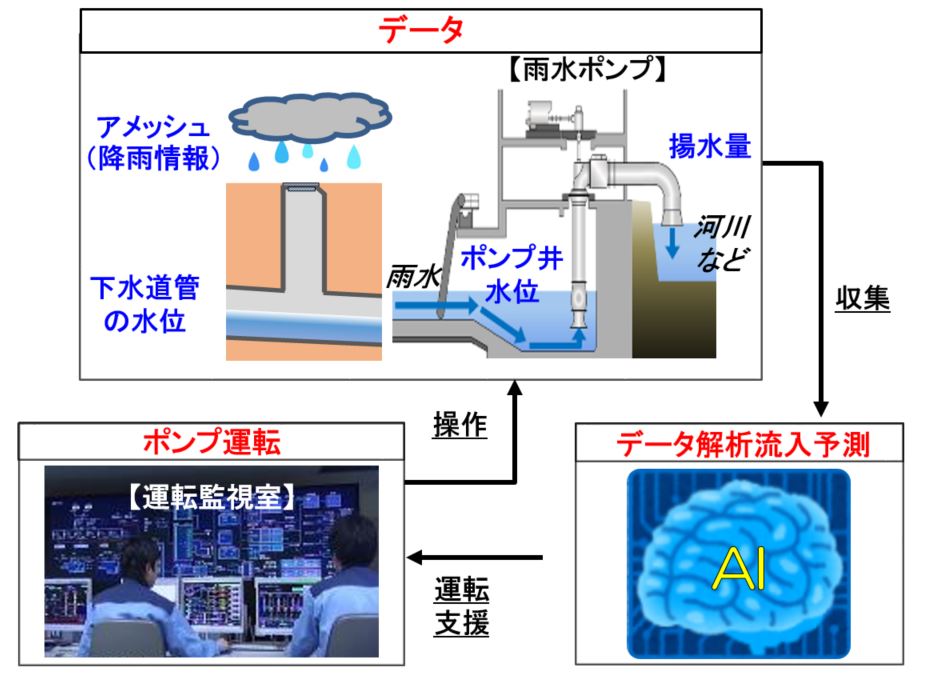
雨水ポンプ運転支援イメージ
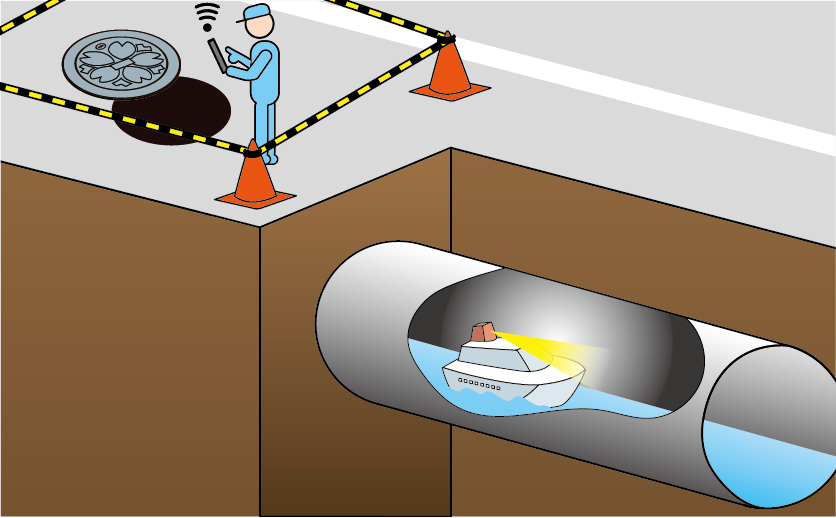
デジタル技術を活用した下水道施設の維持管理に関する調査・研究
〇ドローンや船型ロボットの調査・研究(2020~)
- 3回目の走行実験を行いました。
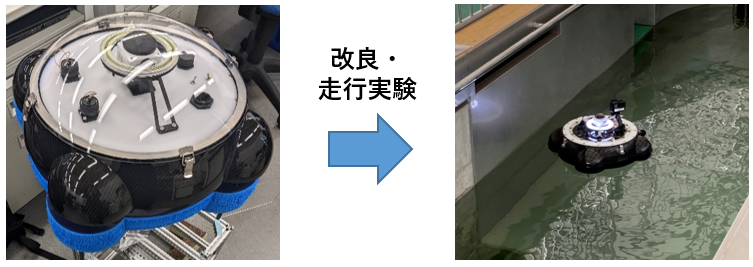
改良試作ロボットの走行実験の様子
〇試行結果を踏まえたウェアラブルカメラの導入検討(2021~)
- 事務所等で活用できる方策を検討しました。
多機能型マンホール蓋を活用したリアルタイム水位測定
〇都と市町村の汚水管の接続点等に設置完了(2021)
(2020年度:14か所、2021年度:23か所)
- 設置済。
〇市町村との測定結果の共有(2021~)
- 測定結果の共有を行いました。

多機能型マンホール活用イメージ
今後の取組(2022年10~12月)
AIを活用した雨水ポンプ運転支援技術の開発
〇精度向上に向けた豪雨時データの蓄積
- 豪雨時のデータ数を増やし、AIの解析精度を高めていきます。
デジタル技術を活用した下水道施設の維持管理に関する調査・研究
〇ドローンや船型ロボットの調査・研究(2020~)
- 3回目の走行実験結果を基に試作品の改良を行い、水再生センターにおいて走行実験を行います。
〇試行結果を踏まえたウェアラブルカメラの導入検討(2021~)
- 事務所等の安全パトロールなどにおいて、様々な現場で運用します。
多機能型マンホール蓋を活用したリアルタイム水位測定
〇都と市町村の汚水管の接続点等に設置完了(2021)
(2020年度:14か所、2021年度:23か所)
- 設置済。
〇市町村との測定結果の共有(2021~)
- 測定結果の共有を行います。
- 市町村と対策について会議を行います。